Дайджест
Железо
Одноплатники
Микроконтроллеры
Код
Python
Linux
ИИ
Аудио
Мультимодальные
Обработка естественного языка
Компьютерное зрение
Медиатека
Фильмы
Подкасты
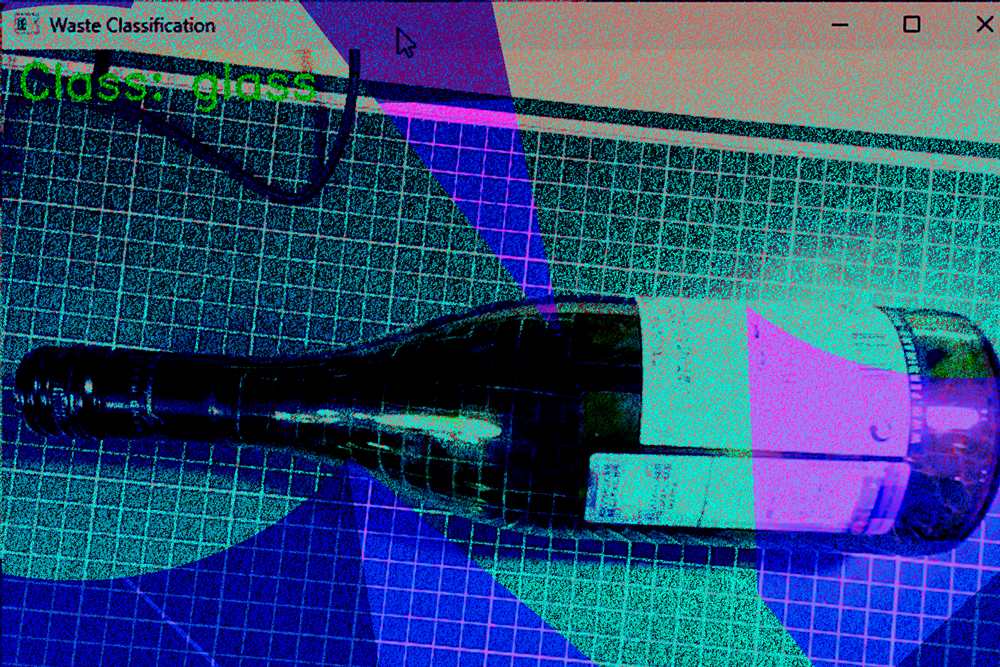
Экологичный ИИ: обучаем нейросеть классифицировать мусор
22.09.2024
статья здесь
Экологичный ИИ: обучаем нейросеть классифицировать мусор
Python
,
ИИ
,
Код
,
Компьютерное зрение
→
PyTorch
,
ResNet50